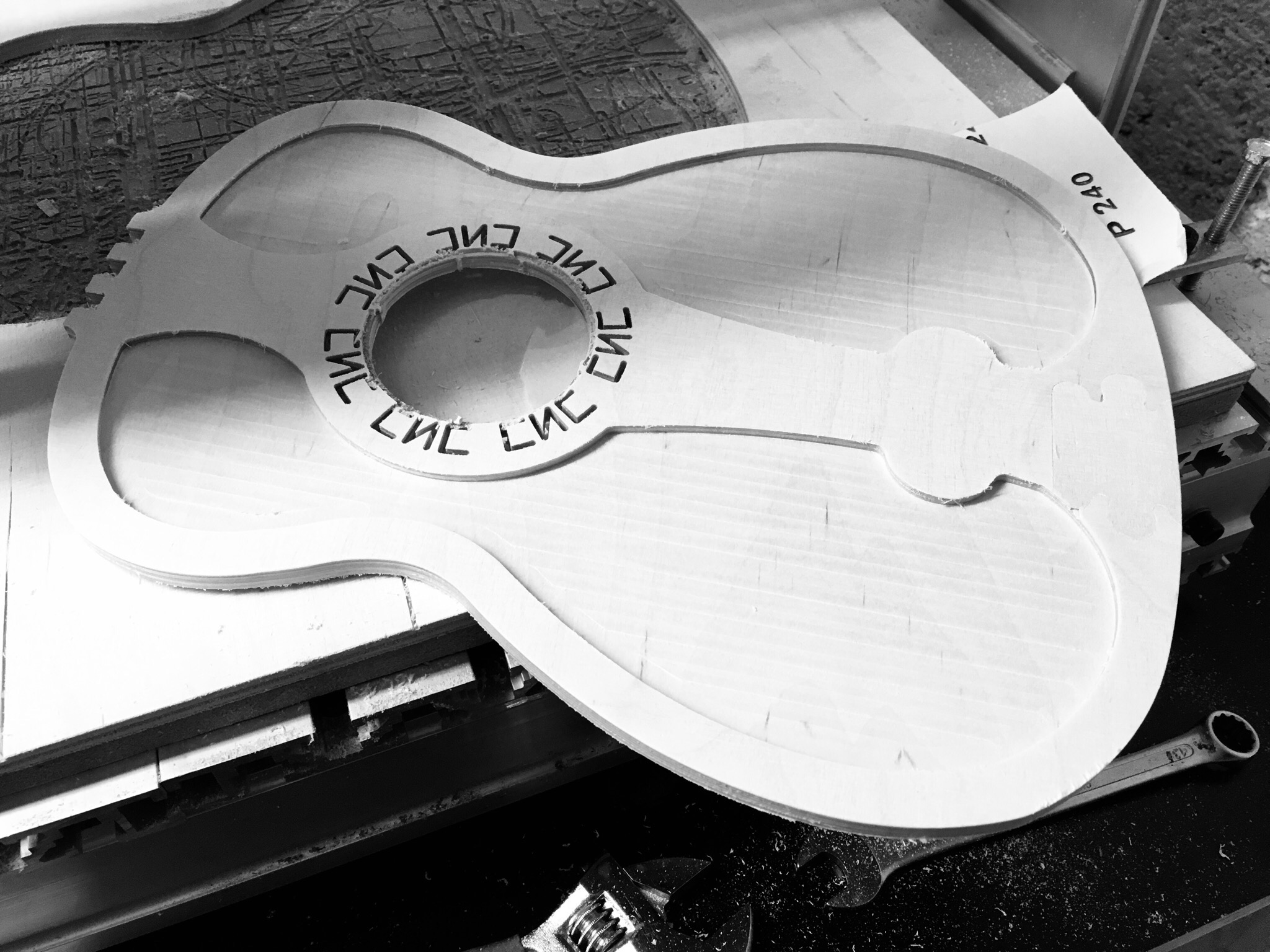
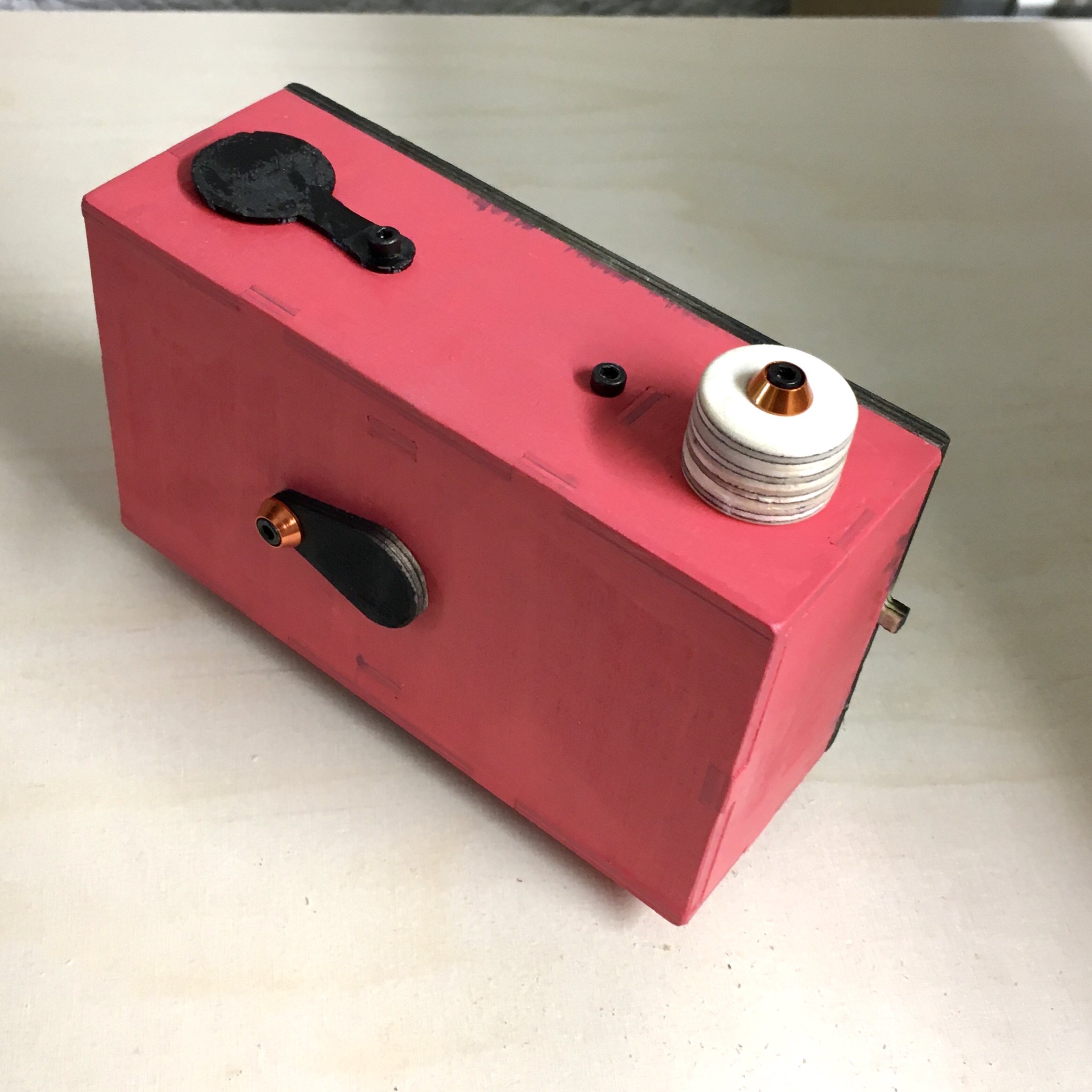
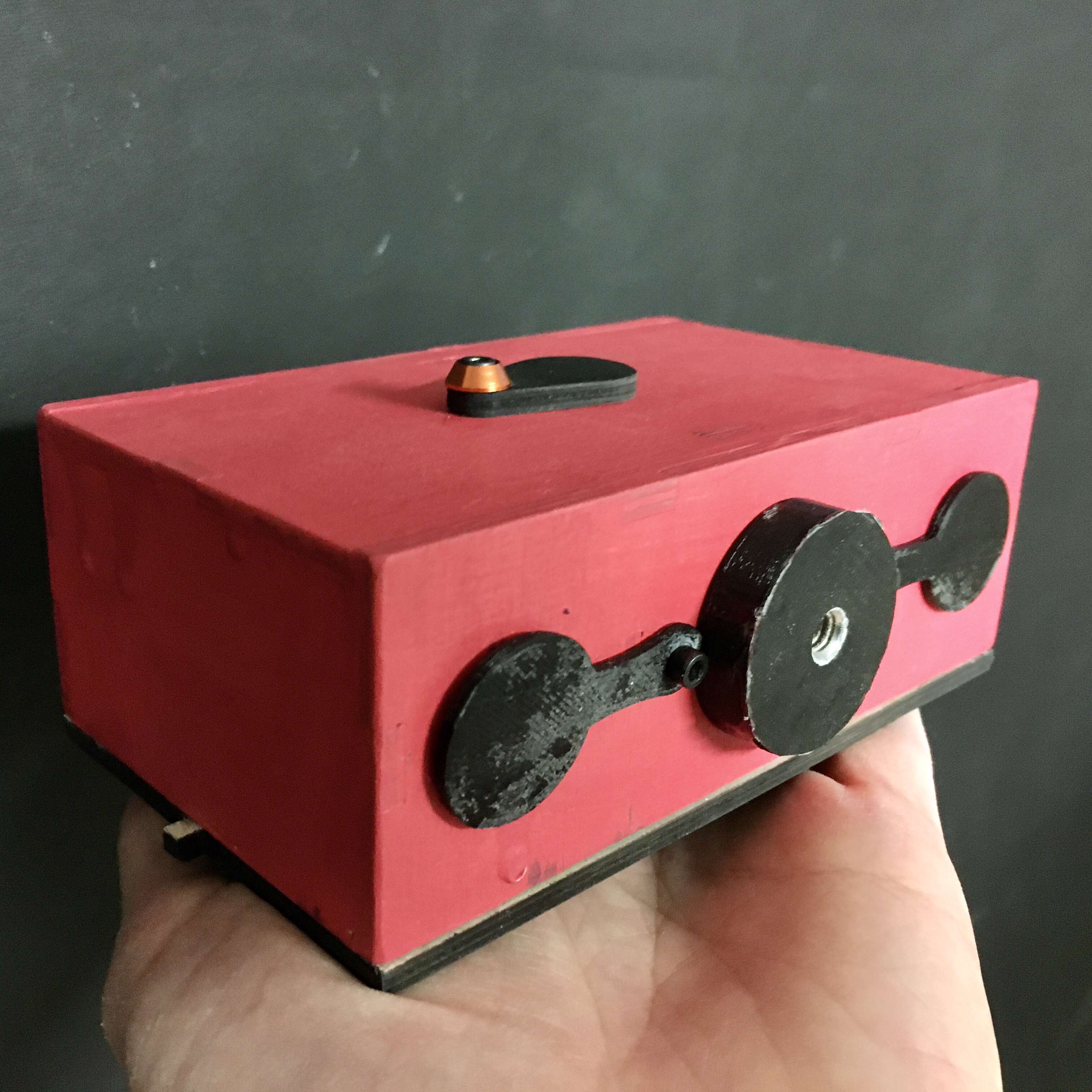
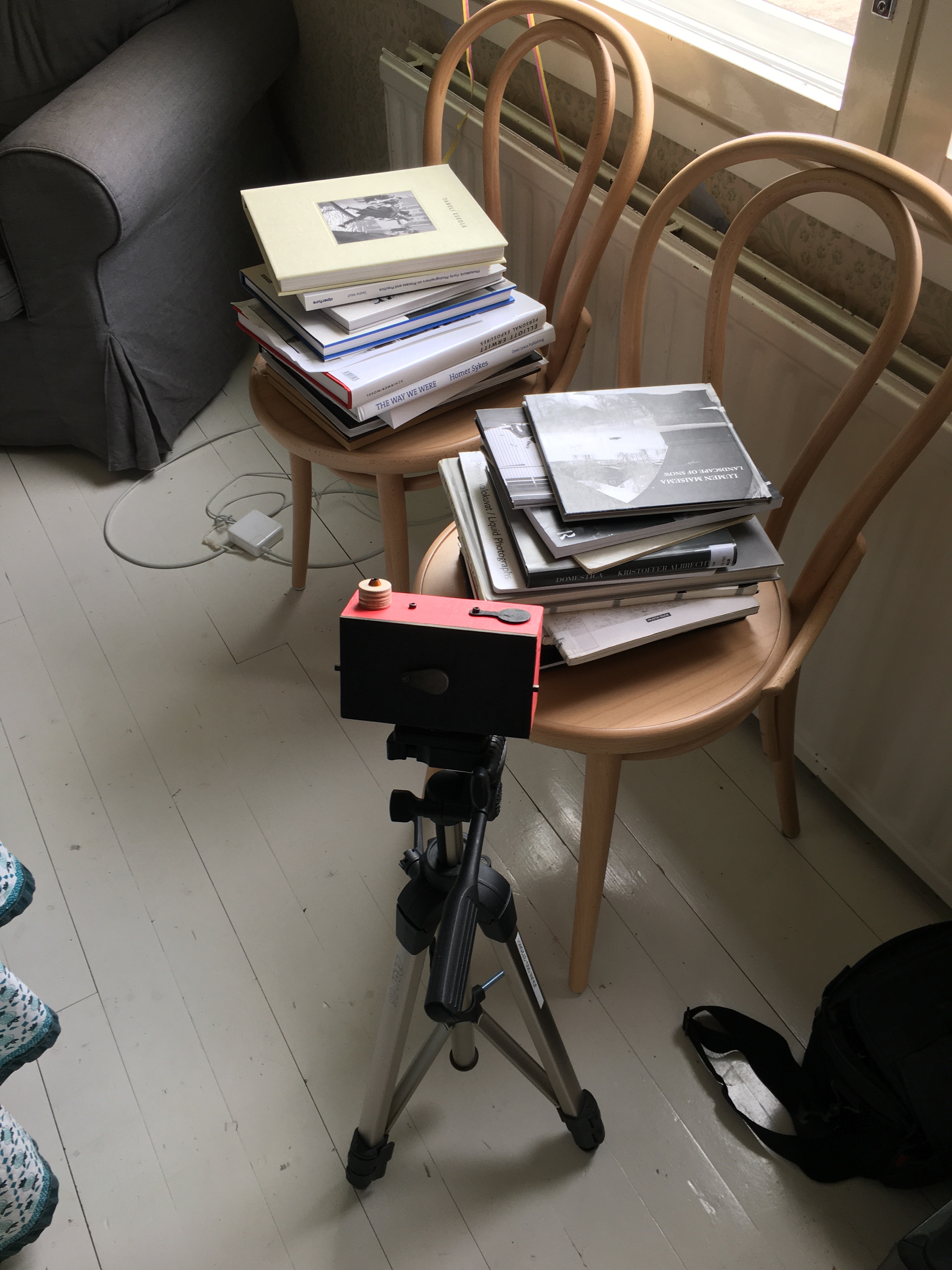
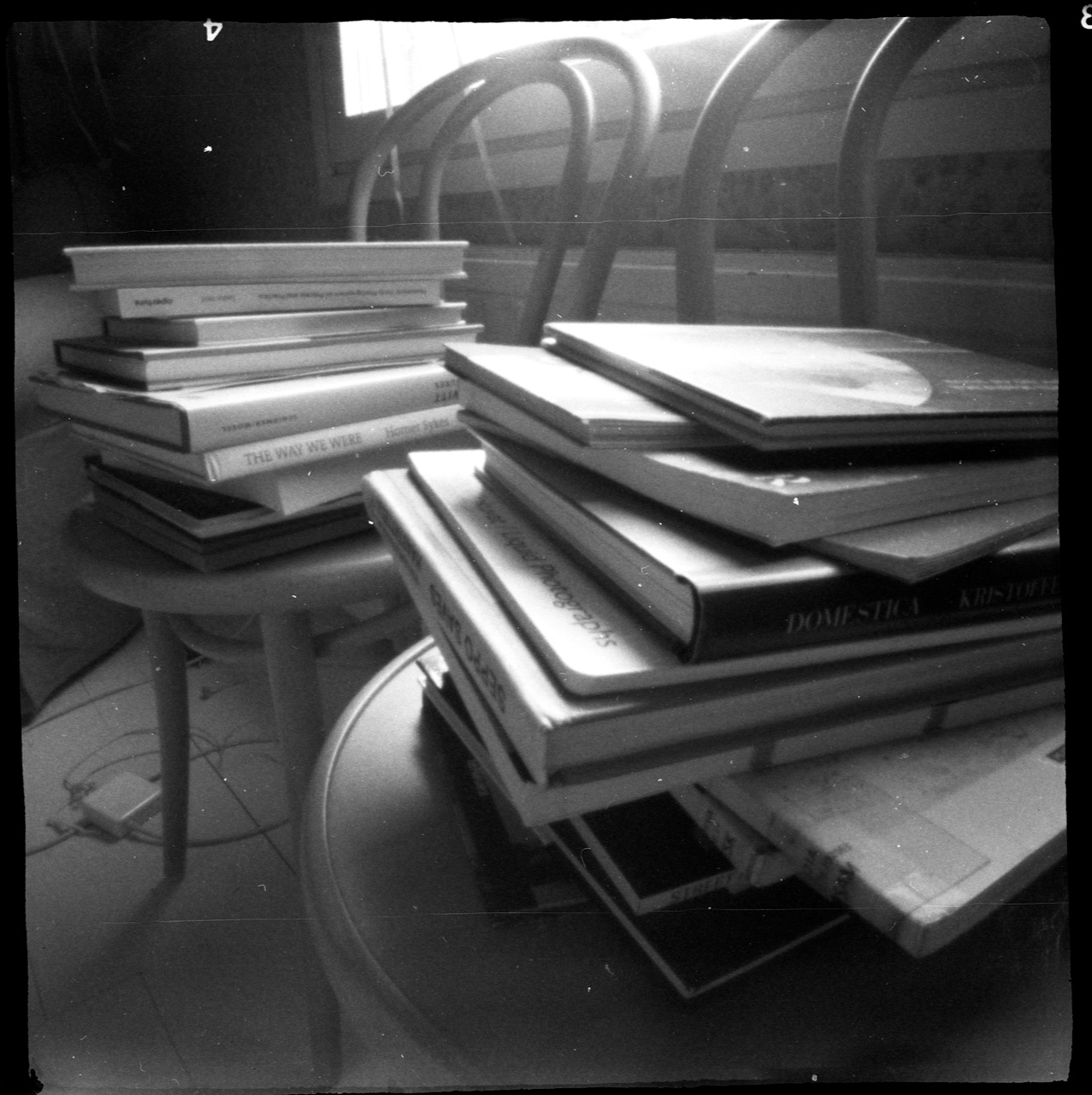
CNC milled wooden 6×17 film camera.
Negative size
56mm × 168mm
Lens
Schneider-Kreuznach (Technika) Super Angulon f8 90mm
FOV
Horizontal 86 degrees
Vertical 34.6 degrees
35mm equivalent focal length
18mm
Some frames with the camera:



Pinhole size: 0.28mm







Here’s DXF design of Joerg’s original design. The holes in the file are 3.5mm but those are bit tight for 5mm tube that I used. I suggest 4.5mm – 5mm holes if you use 5mm silicone tube.
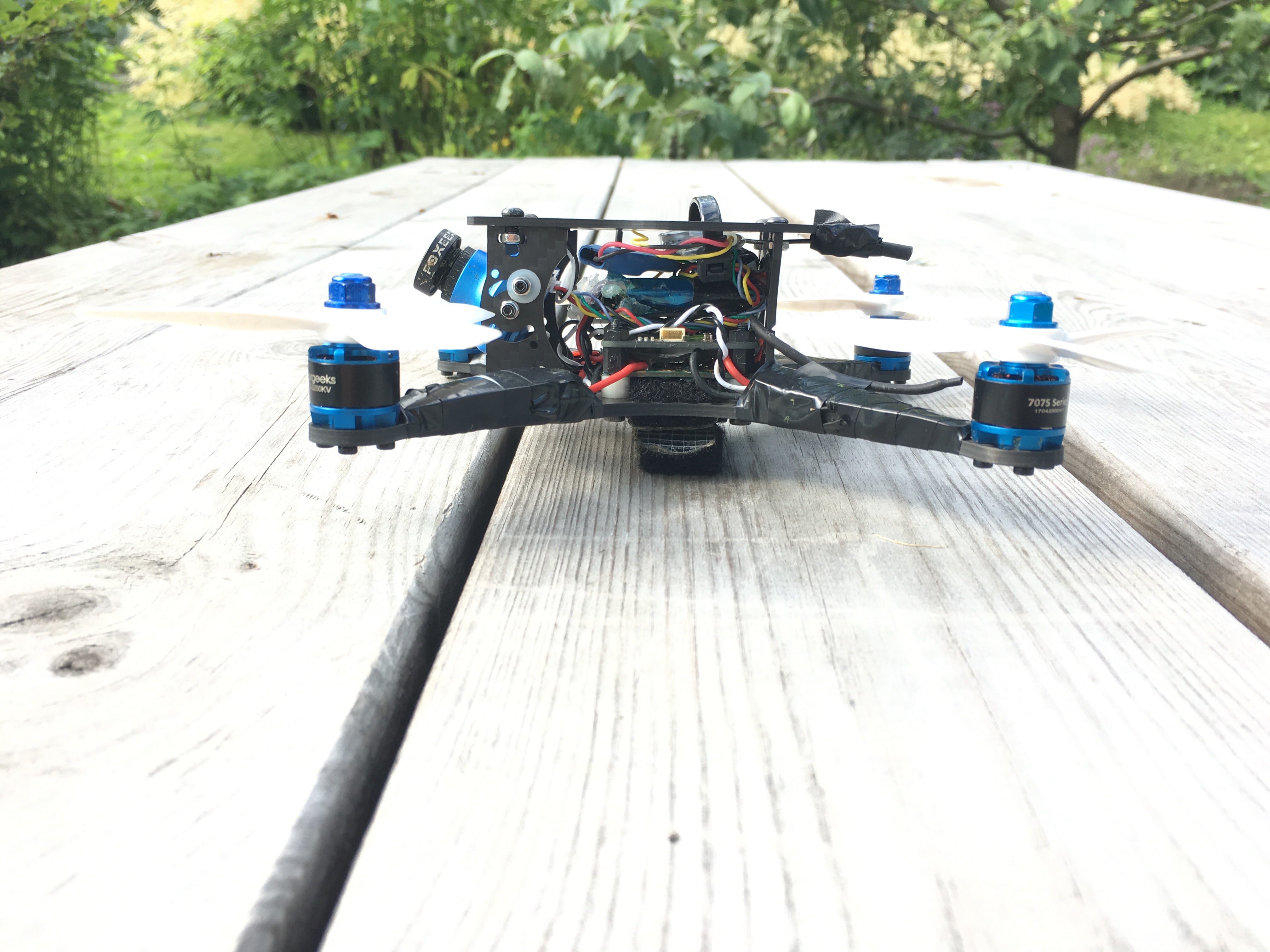
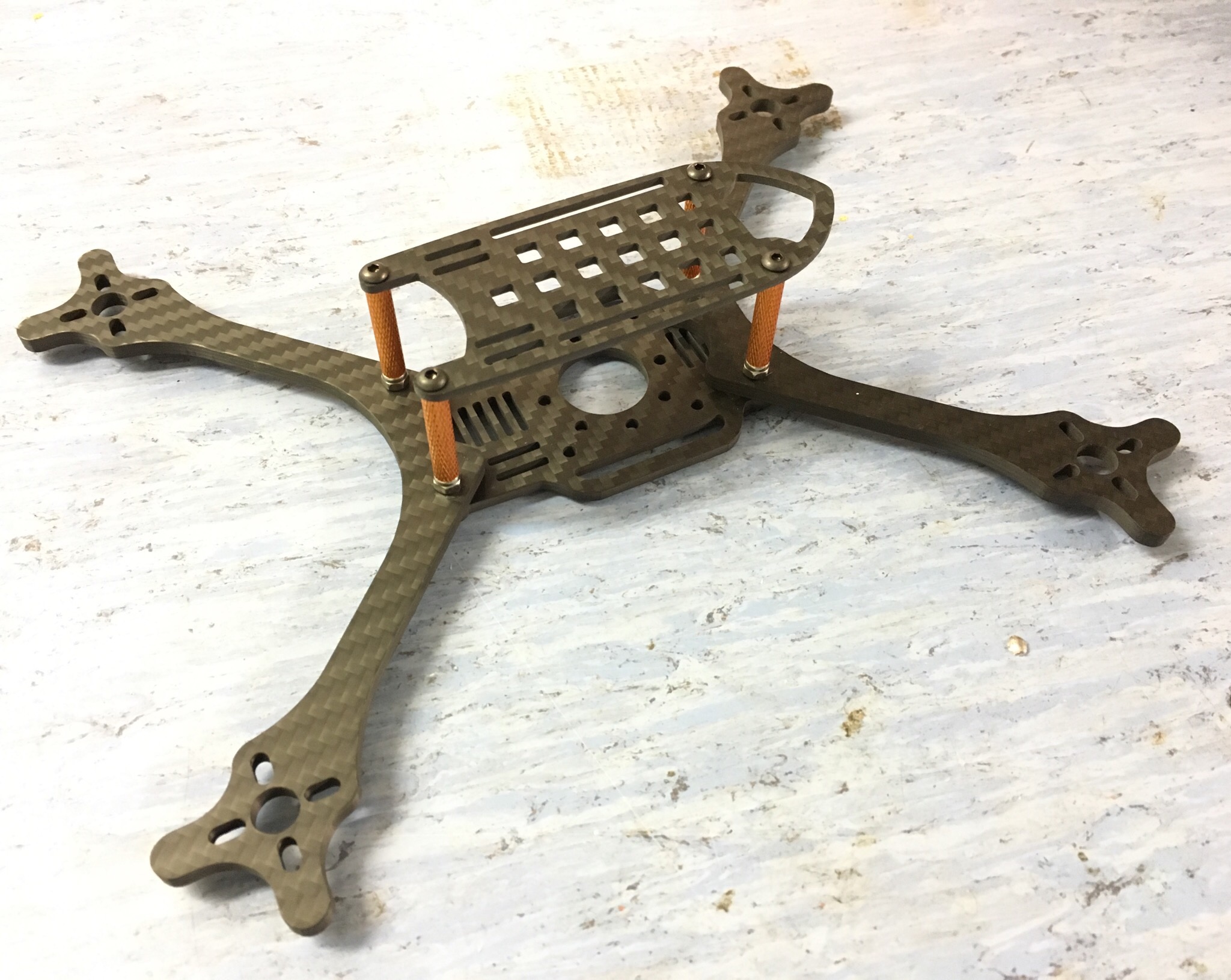
Yes, it’s my own version of Floss 2.1 originally designed by KababFPV.
4mm dual-arms, 3mm bottom plate, 2mm top plate.
AUW (just add battery) 320gr (with props, VTX antenna, strap etc..)









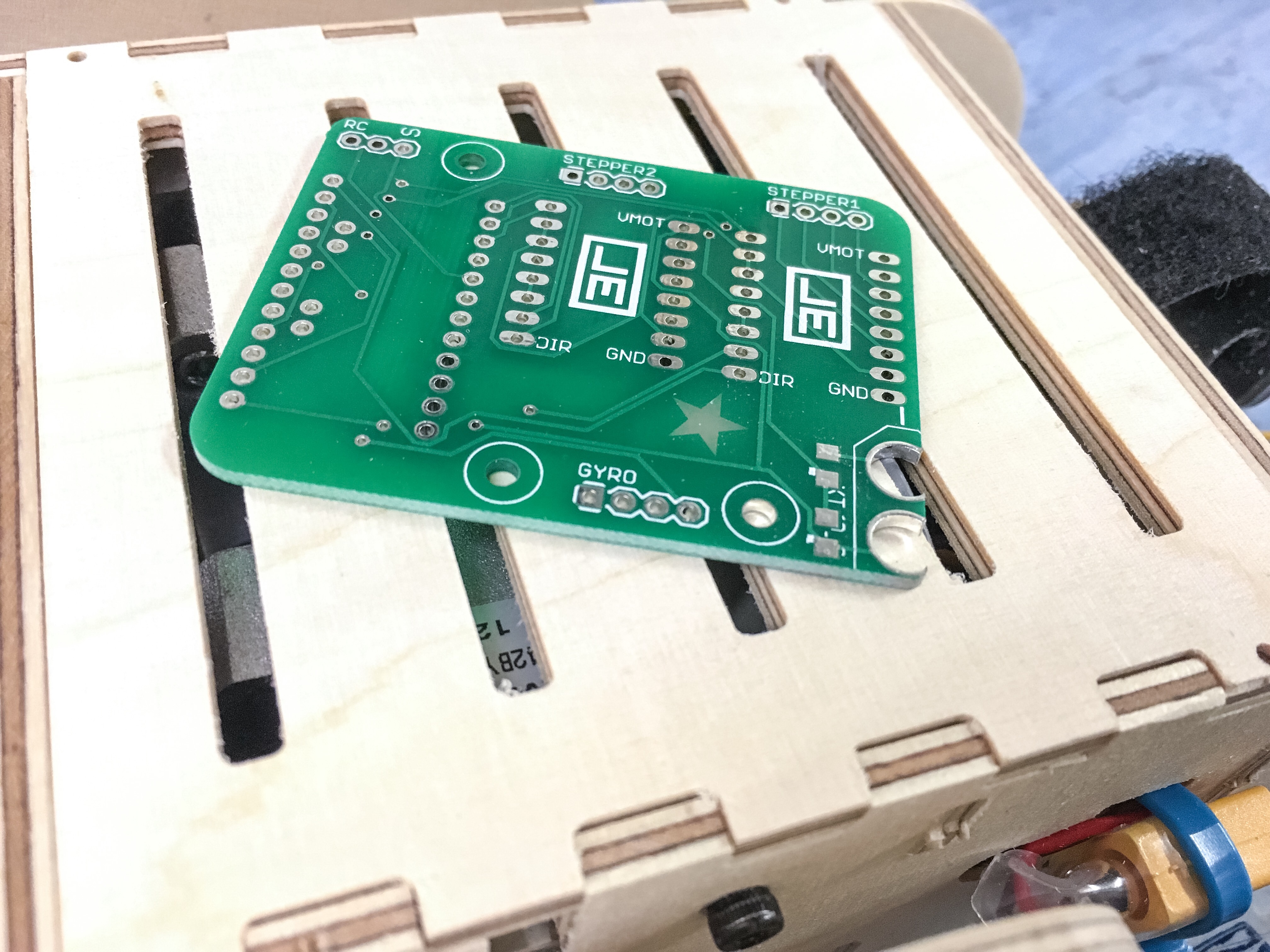
– Nema 17 steppers (Bipolar, 200 Steps, 42x42mm, 12V, 0.33A)
– A4988 Chinese stepper drivers
– 3S (12.6V) battery
– Arduino Pro Mini (5V, 16Mhz)
– Turnigy Evolution transmitter and TGY-iA6C Receiver
– MPU6050 gyro