Jouni Prints & Mills
A guy from Finland bought 3D-printer. Year later he bought a CNC mill. And he is posting many of his prints and mills here.
Menu
Skip to content
Home
My CNC mill
My standards
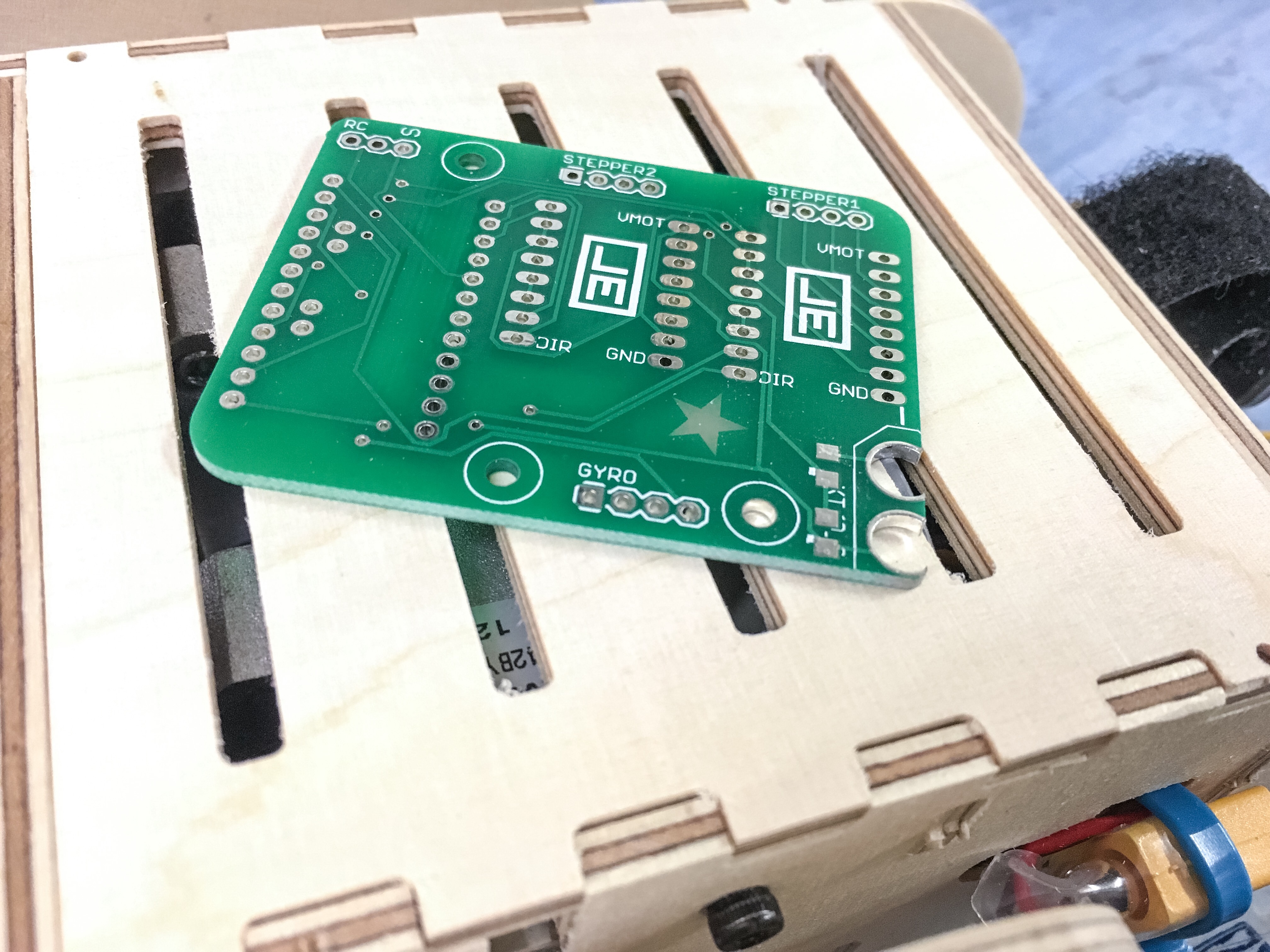
Self balancing robot revisited
Self balancing robot revisited